5-DOF Robotic Manipulator — IoT Standalone
Personal project — kinematics, firmware, web UI
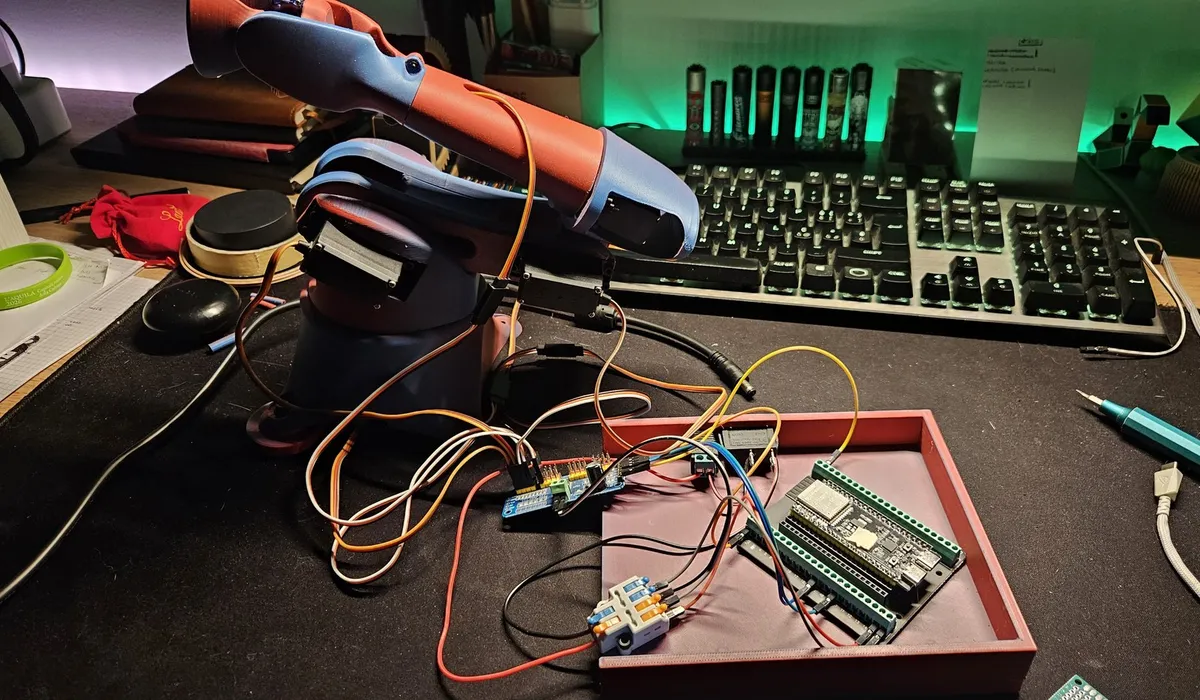
A complete, fully standalone 5-DOF robotic arm controlled wirelessly from a web interface served by the microcontroller itself — no PC in the loop at runtime. The arm is built and working; only the end-effector was left unmounted once the project had served its full learning purpose across mechanics, kinematics, firmware and on-device UI.
- On-device kinematics: forward kinematics from Denavit-Hartenberg parameters; inverse kinematics via an iterative Jacobian-transpose solver (2 mm tolerance) with floor and enclosure collision checks — all computed on the MCU.
- Dual-core ESP32-S3: Core 0 runs WiFi + an async WebSocket server, Core 1 runs a 50 Hz per-joint PID motion loop with rate limiting and anti-windup.
- Web UI in flash: a single-page interface (joint sliders + Cartesian XY picker + live Three.js 3D twin sharing the firmware’s DH model) is compiled straight into the binary.
- Drives 5 servos (4× MG996R + gripper) through a PCA9685 PWM driver over I2C; an automatic simulation mode lets the full control stack run without hardware attached.